结构光系统标定程序!通过结构光三维立体标定,利用标定模板达到三维实际与图像的配准!!!!
”三维配准 标定 结构光_matlab 结构光】 结构光立体“ 的搜索结果
三维激光点云配准是点云三维建模的关键问题之一。经典的 ICP 算法对点云初始位置要求较高且配准 效率较低,提出了一种改进的 ICP 点云配准算法。该算法首先利用主成分分析法实现点云的初始配准,获得较好 的点云初始...
关于点云配准与结构光的论文
标签: 点云,结构光
关于点云配准与结构光的论文,很多都是知网上下的,省的你去图书馆蹭网了欧,某宝上可以代下载哦,正好40篇论文
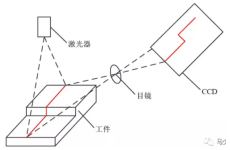
为解决现有线结构光大尺度测量标定复杂、精度不高的问题, 提出了一种基于多视觉线结构光传感器的大尺度、高精度测量方法。多视觉线结构光传感器含1个激光器和多个等间距并排的相机(一主多从), 相互间有1/3左右重叠...
2017年9月份,标志性的事件为 iPhone X 推出了基于 PrimeSense light coding 方案的结构光 3D 人脸识别方案。现国产android 手机厂商都在 3D 人脸识别领域进行自己的布局,无奈的是 PrimeSense的技术门槛太高,或者...

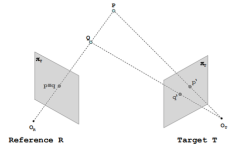
对双目图像进行大步距图像分割, 提取目标区域, 平滑降低图像噪声, 重心法提取亚像素级结构光条纹中心, 根据极线约束进行左右条纹配准, 三维算法得到空间点坐标, 可方便地转换到世界坐标系, 实现全局坐标的统一。
结构光双目三维重建是一种常见的三维重建方法,它基于结构光投影仪和双目相机,通过投射结构光条纹来获取物体表面的几何信息,并通过双目相机获取物体的纹理信息,从而重建出物体的三维模型。 在Matlab中,可以使用...


点云配准是地面三维激光扫描数据处理的重要环节。面向地形起伏较小的场景,提出了一种基于投影分布熵的地面激光点云自动配准方法,利用信息熵对点云投影分布的集中程度进行描述,并寻找点云间的最佳分布进行粗配准,以此...
利用除式模型特殊的结构形式将标定过程转化为线性求解过程,避免了传统标定方法采用多项式校正模型(PM)进行非线性优化搜索,提高了标定效率,保证了标定参数的稳定性.标定实验和实物配准实验表明,采用除式模型...
结果表明,在暗时,与浮游生物群落的垂直结构完全对应,0-10 m层的生物发光强度超过了60-70 m层的生物发光强度一个半阶,并且实际上确定了0-10 m处的BP。 100 m层。 浮游生物的发光特性,对于利用空间观测手段进行...
。。。
基于线结构光的三维测量系统转轴快速标定方法 2016-01-06 20:09 摘 要: 为了标定基于线结构光的三维测量系统中的旋转轴,提出了一种基于圆锥体参照物的快速标定方法。将一个圆锥体的参照物固定放置在旋转平台...


另外,Matlab中也有许多计算机视觉和三维重建的工具箱和函数,如视觉SLAM工具箱和点云处理工具箱,可以进一步处理和分析线结构光产生的三维点云数据,并进行重建、配准和可视化等操作。此外,Matlab还支持与其他软件...
目前,将计算机视觉与光学三维测量技术进一步融合,同时推动三维重建技术的应用,因此,为了高效完成立体匹配,进一步提升三维重建的精度,不连续点时容易产生匹配错误,而结合结构光后能有效增加特征点,方便后续的...

针对同一场景的红外和可见光图像间一致特征难以提取和匹配的难题, 提出了一种在多尺度空间中基于边缘最优映... 实验结果表明, 该算法能够充 分利用图像间的视觉相似结构, 有效地实现红外和可见光图像的自动配准.


关于点云配准与结构光的论文,很多都是知网上下的,省的你去图书馆蹭网了欧,某宝上可以代下载哦,正好40篇论文 相关下载链接://download.csdn.net/download/huabowen0/10279566?utm_source=bbsseo

推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地